Probleemstelling:
Airborne wind energy (AWE) is an emerging and potentially disruptive technology that aims at converting wind energy by flying crosswind patterns with a tethered flying device (See Figure 1). It has the potential to increase the wind energy yield by capturing wind energy at locations and heights unreachable for conventional horizontal-axis wind turbines. This technology can thus have a strong impact on the transition to a sustainable energy system by generating more green electricity, with higher availability and at a lower cost, which is some of the main limitations today.
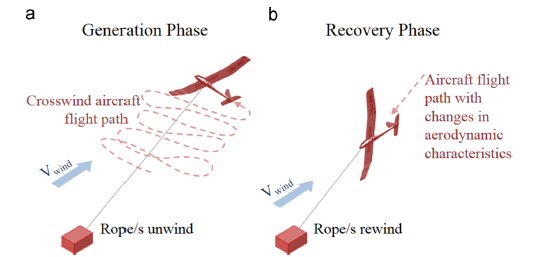
Figure 1: Two phases of a ground generation AWE system. [source: Airborne Wind Energy Systems: A review of the technologies. Cherubini A. et al.]
An AWE aircraft performs a highly dynamic flight maneuver (in case of a figure-8 pattern) when compared to conventional aircraft. The transition between pumping and reel-in mode is additionally highly dynamic. Simulation of these AWE systems requires accurate dynamic models for all systems involved; these include the ground station, tether (connecting cable), and the aircraft. In the current state-of-the-art modeling, the tether is modeled either using assuming it to be straight or by multiple particle systems given by point masses and spring-damper elements. However, these models do not consider important effects such as unsteady aerodynamics. Nevertheless, due to its long length, the tether is found to have a significant effect on the performance and behavior of an AWE system.

Figure 2: Clear picture of all components involved: ground station, tether, aircraft [Source: Ampyx Power B.V.]