Probleemstelling:
Airborne wind energy (AWE) is an emerging and potentially disruptive technology that aims at converting wind energy by flying crosswind patterns with a tethered flying device (See Figure 1). It has the potential to increase the wind energy yield by capturing wind energy at locations and heights unreachable for conventional horizontal-axis wind turbines. This technology can thus have a strong impact on the transition to a sustainable energy system by generating more green electricity, with higher availability and at a lower cost, which is some of the main limitations today.
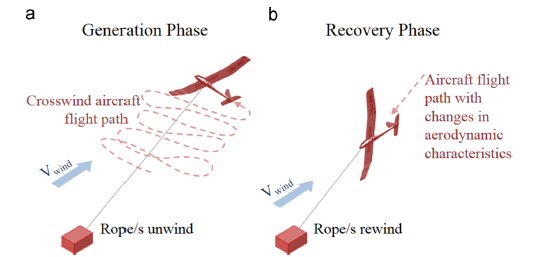
Figure 1: Two phases of a ground generation AWE system. [source: Airborne Wind Energy Systems: A review of the technologies. Cherubini A. et al.]
An AWE aircraft performs a highly dynamic flight maneuver (in case of a figure-8 pattern) when compared to conventional aircraft. The transition between pumping and reel-in mode is additionally highly dynamic. Simulation of these AWE systems requires accurate dynamic models for all systems involved; these include the ground station, tether (connecting cable), and the aircraft. In the current state-of-the-art modeling, the tether is modeled either by assuming it to be straight or by multiple particle systems given by point masses and spring-damper elements. However, these models do not consider important effects such as unsteady aerodynamics. Nevertheless, due to its long length, the tether is found to have a significant effect on the performance and behavior of an AWE system.

Figure 2: Clear picture of all components involved: ground station, tether, aircraft [Source: Ampyx Power B.V.]
In previous research, the tether dynamics have been investigated using a wall-resolved approach with the Chimera technique. However, due to the dimensions of the system (a tether is several hundreds of meters long and has a diameter in the order of only centimeters), such simulations are typically rather expensive. Therefore, a new approach will be investigated where the tether is no longer explicitly present in the flow domain. Instead of resolving the flow close to the wall, the forces that the tether exerts on the flow are introduced as source terms in the momentum equation. As such, the tether is no longer present as a physical object in the flow, eliminating the need for a fine mesh close to wall boundaries, effectively reducing the computational cost of such simulations.